Budowa
Układ oparty został o minikomputer Raspberry Pi, króry podłączany jest do głównej płyty urządzenia przez złącze GPIO oraz USB. Aby zminimalizować pobierany na postoju prąd, RPi nie jest cały czas włączone. Jego zasilaniem steruje mikroprocesor AVR, który w momencie wykrycia włączenia radia lub zapłonu włącza główne zasilanie 5V w układzie. Poza tym jego zadaniem jest:
– obsługa klawiatury matrycowej pilota przy kierownicy,
– odczyt stanów zapłonu, radia,
– sterowanie zasilaniem wyświetlacza.
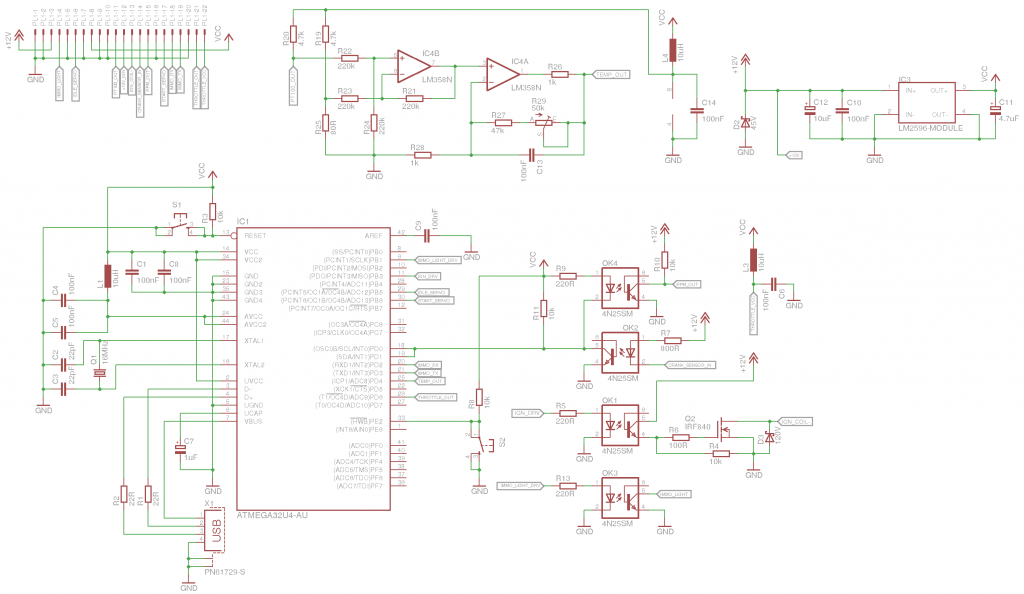
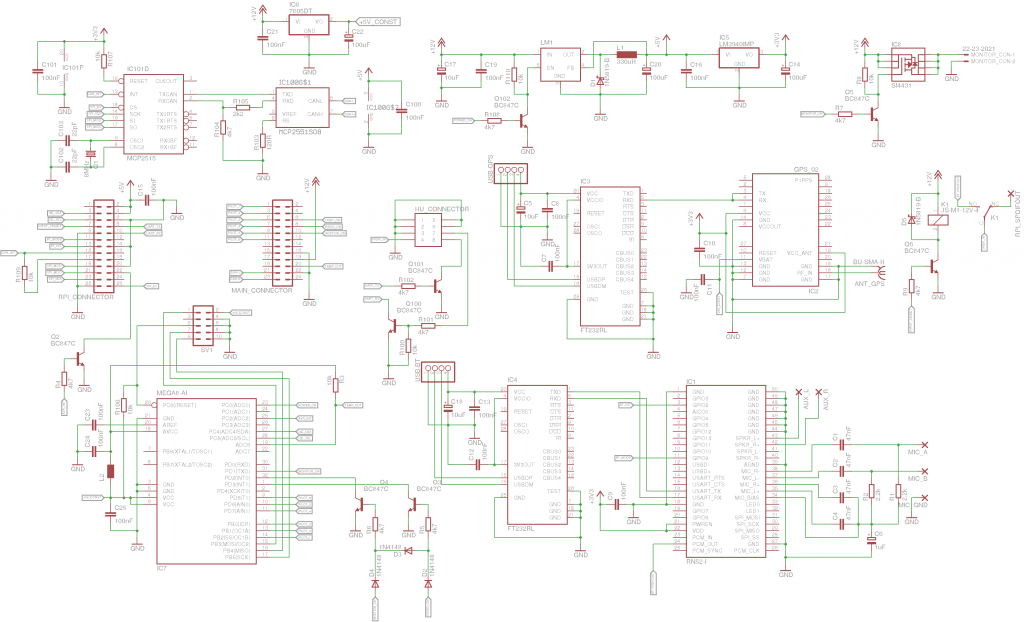
RPi oraz AVR komunikują się za pomocą magistrali I2C. Po wyłączeniu zapłonu, AVR przesyła o tym informację do aplikacji działającej na RPi, która po godzinie na wyłączonym zapłonie zamyka system i wysyła do AVRa polecenie wyłączenia zasilania i przejścia w stan uśpienia. Schemat urządzenia został przedstawiony poniżej.
Komunikacja z radiem
Komunikacja z radiem samochodowym odbywa się trzema torami:
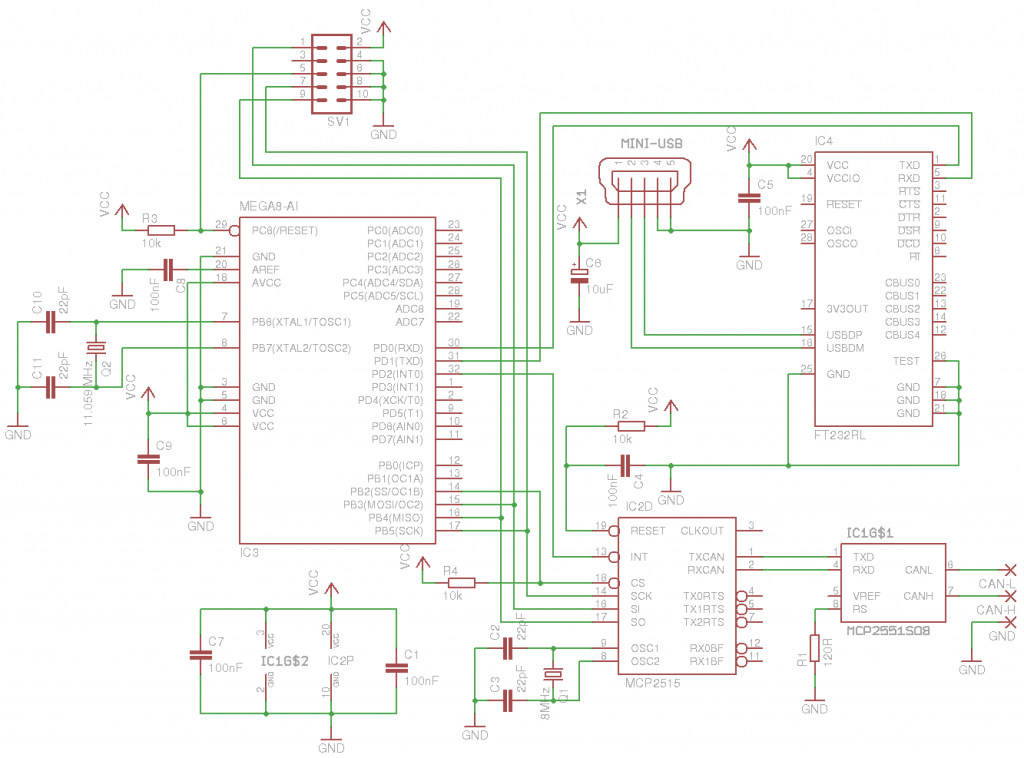
1. Szyna CAN – po tej szynie radio wysyła informację co ma pojawić się na wyświetlaczu a oryginalny wyświetlacz wysyła informacje o naciśniętych klawiszach na pilocie pod kierownicą. Niestety protokół komunikacji nie był nigdzie opisany, ale przy pomocy zbudowanego analizatora CAN oraz dużej ilości cierpliwości udało mi się go rozpracować, na tyle że moja aplikacja emuluje w pełni wszystkie funkcje które obsługiwane są przez standardowy wyświetlacz. Po więcej informacji zapraszam do kodu źródłowego:
https://github.com/milyges/CarPI/blob/master/src/rpi-app/displayemulator.h
https://github.com/milyges/CarPI/blob/master/src/rpi-app/displayemulator.cpp
2. UART – służy do emulacji zmieniarki płyt CD, którą moja aplikacja udaje. Dzięki temu przetwarzaniem cyfrowo-analogowym muzyki odtwarzanej z dysku USB zajmuje się radio (zmieniarka wysyła do radia sygnał audio za pomocą S/PDIF) a nie Raspberry PI, co wpływa na poprawę jakości dźwięku w stosunku do karty dźwiękowej zintegrowanej w RPi. Kod emulatora zmieniarki bazuje na dokumentacji dostępnej w internecie i znajduje się:
https://github.com/milyges/CarPI/blob/master/src/rpi-app/changeremulator.h
https://github.com/milyges/CarPI/blob/master/src/rpi-app/changeremulator.cpp
3. AUX – do analogowego wejścia radia podpięte zostało wyjście audio modułu bluetooth.
Oprogramowanie
Raspberry Pi pracuje pod kontrolą systemu operacyjnego Raspian (bazującego na Debianie). Zainstalowany jest serwer X.Org, manager okien OpenBox i kilka innych, niezbędnych do prawidłowego działania programów. Główna aplikacja, sterująca wszystkich napisana została w języku C++, przy wykorzystaniu biblioteki Qt. Cały kod opublikowany został na GitHubie (link niżej).
Nawigacja GPS
Do nawigacji GPS został wykorzystany program Navit. Jego kod źródłowy został delikatnie zmodyfikowany aby usunąć część funkcjonalności (np. podświetlanie możliwych znaków do wpisania w nazwie miejscowości), które nie działały zbyt dobrze. Zmodyfikowany został również plik konfiguracyjny, usunięte zostały wszystkie niepotrzebne warstwy oraz punkty POI aby mapy były jak najbardziej czytelne.
Obługa OBDII
Główna aplikacja na RPi, komunikuje się po USB z adapterem OBD II, opartym o popularny układ ELM327. W chwili obecnej służy to do pokazania dodatkowych wskaźników:
– temperatury powietrza zasysanego
– ciśnienia doładowania
– ciśnienia paliwa w listwie Common Rail
– temperatury cieczy chłodzącej
– obliczonego obciążenia silnika
– napięcia w instalacji elektrycznej
Jest to tak na prawdę taki bajer, który nie był projektowany od początku a pojawił się pod wpływem chwilowego impulsu 😉
Obudowa wyświetlacza, tzw. daszek
Wykonany został na bazie oryginalnego: wycięty został większy otwór, przygotowana ramka na nowy wyświetlacz. Następnie ramka została wklejona w otwór a wolna przestrzeń wypełniona matą oraz żywicą. Dalej wszystko zostało zaszpachlowane do równa, wyczyszczone papierem wodnym i pomalowane podkładem i farbą. Pierwszy raz robiłem coś takiego, było bardzo dużo poprawek, ale wydaje mi się że wyszło przyzwoicie.
Obsługa
Całość dodatkowych funkcji obsługuje się wykorzystując pilot pod kierownicą, co pozwala na obsługę w trakcie jazdy bez odrywania rąk od kierownicy. Przycisk na dole pilota, służący normalnie do zmiany płyty w zmieniarce, wykorzystany został do wejścia w tryb menu. W tym trybie możemy albo zmienić ekran, albo wejść w menu nawigacji.
Po menu nawigacji poruszamy się wykorzystując przyciski: Vol+/Vol- jako góra dół, SRC+/SRC- jako prawo/lewo, przycisk Mute jako enter a przycisk Load (ten na dole) jako Escape. Na początku wprowadzanie nazw miejscowości i ulic wydaje się toporne, ale po kilku razach już wpisuje się w miarę szybko i sprawnie.
Kosztorys i czas trwania
Projekt od analizy komunikatów CAN z radia do finalnej wersji powstawał około roku (głównie wieczorami po pracy). Dużą część elektroniki miałem, więc ciężko mi wycenić:
– Raspberry Pi: około 130zł
– Wyświetlacz: 100zł
– Moduł bluetooth: 80zł
– Moduł GPS: 50zł
– Pozostała elektronika: myślę że do 50zł
Razem około: 410zł
Galeria zdjęć
Zdjęcia prezentują poszczególne fazy projektu od prototypu aż po gotowy układ zamontowany w samochodzie.



















Filmy
Poniżej umieszczam kilka filmów prezentujących możliwości urządzenia oraz rozwój oprogramowania.