Dozymetr – urządzenie do pomiaru dawki promieniowania jonizującego. Urządzenie zostało zbudowane od podstaw. Jako detektor promieniowania użyta została tuba Geigera-Müllera STS-5 produkcji radzieckiej. Urządzenie zasilane jest z baterii Li-Ion z telefonu nokia. Ładowanie baterii odbywa się poprzez USB. Dodatkowo poprzez ten port można na bieżąco odczytywać wszystkie parametry pracy urządzenia na komputerze. Całość (tuba, bateria oraz elektronika) została zamknięta w obudowie z tworzywa sztucznego.
Dodatkowo w obudowie znajduje się buzzer, który sygnalizuje pojawienie się impulsu na tubie. Wyniki pomiaru (uśrednione z wybranego okresu czasu; od 10 do 60 sek) pokazywane są na wyświetlaczu z telefonu nokia 5510.
Budowa
Głównym elementem licznika jest tuba STS-5. Jeśli chodzi o parametry jest ona bardzo zbliżona do popularnej tuby SBM-20, co pozwala na proste wyskalowanie detektora. Tuba wymaga napięcia zasilania około 400V. Aby uzyskać takie napięcie, zastosowana została przetwornica, opisana tutaj. Przetwornica została zbudowana z części znalezionych głównie z starych zasilaczach ATX. Dławik został nawinięty od nowa, drutem z uzwojenia wtórnego ze starego transformatora na rdzeniu z zasilacza ATX.
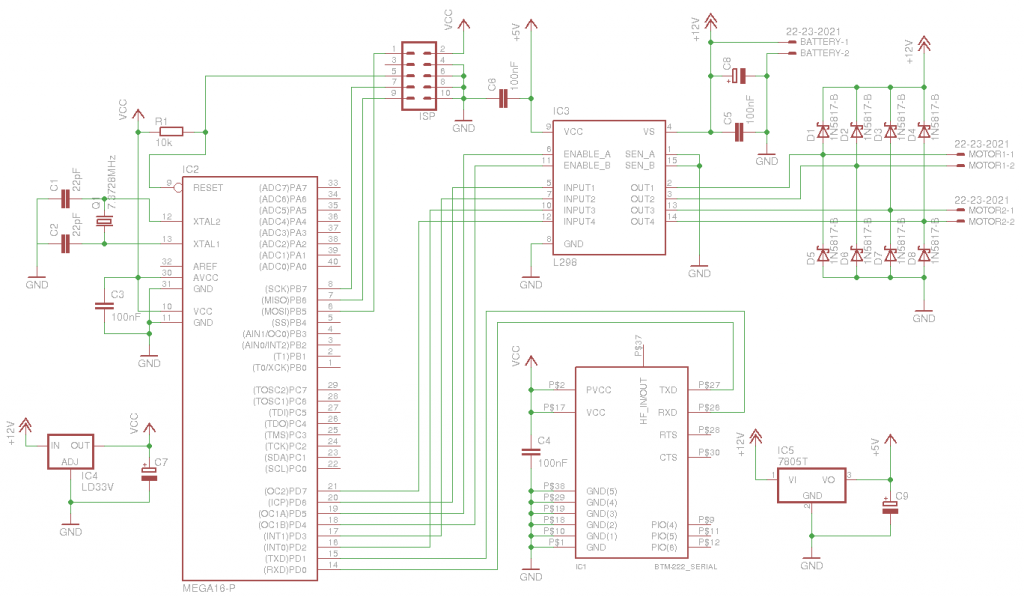
Tuba podłączona jest poprzez tranzystor NPN z mikrokontrolerem AVR Atmega8, który jest sercem całego układu. Dodatkowo na płytce znajduje się druga przetwornica, oparta na układzie LT1513 (znalezionym w starym kontrolerze SCSI), zajmująca się ładowaniem baterii Li-Ion.
Oprogramowanie napisane zostało w całości w języku C, impulsy z tuby zliczane są przez mikrokontroler w przerwaniu zewnętrznym. Do odmierzania czasu wykorzystany został 16-bitowy timer, wykalibrowany aby odmierzał czas z dokładnością do jednej sekundy.
Dozymetr jest już zmontowany i uruchomiony, zostało jeszcze zadbać o względy estetyczne i wykonać z papieru oraz folii panel czołowy, który przykryje krzywo wyciętą obudowę 😉






Dokumentacja

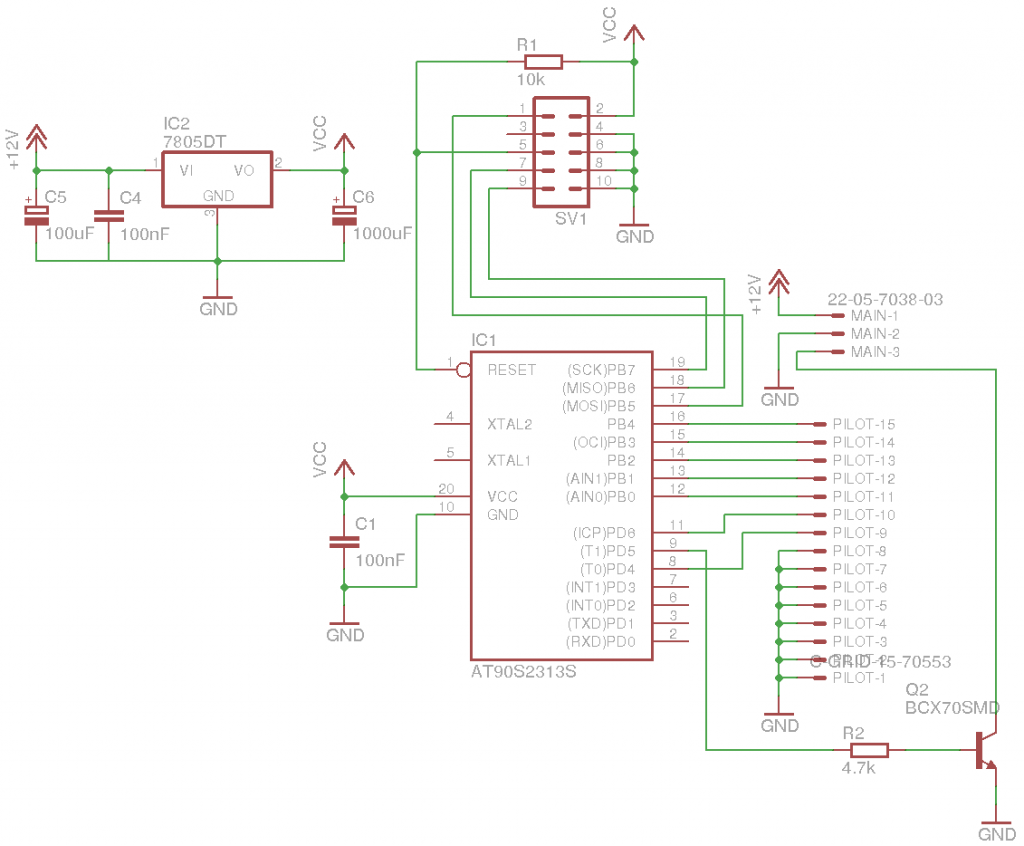
Schemat w PNG