Autko sterowane telefonem z androidem (na podstawie odczytu z akcelerometru telefonu) przez bluetooth. Projekt został wykonany na zaliczenie przedmiotu „Mikroprocesory”. Aplikacja w telefonie, odczytuje odchylenie telefonu w dwóch osiach od pozycji wyjściowej i na tej podstawie przesyła do urządzenia rozkazy, mówiące o kierunku oraz prędkości jazdy.
Budowa
Jako podwozie, został wykorzystany model samochodu, zakupiony z uszkodzoną elektroniką, która została zastąpiona autorskim układem. Sercem układu jest mikroprocesor AVR Atmega16L zasilany poprzez stabilizator liniowy napięciem 3.3V. Procesor komunikuje się poprzez interfejs szeregowy z modułem bluetooth BTM-222, poprzez który otrzymuje polecenia z telefonu (kierunek, prędkość jazdy, czy światła są włączone, etc.). Na podstawie otrzymanych danych, procesor steruje dwoma silnikami (jeden napędza koła, a drugi służy do skręcania). Sterowanie silnikami realizowane jest poprzez układ L298, zawierający w sobie dwa mostki H. Całość zasilana jest z oryginalnej baterii, która była dołączona do autka.
Z racji że projekt wykonywany był na zaliczenie, układ został maksymalnie uproszczony, pewne kwestie (jak na przykład zasilanie), powinny być rozwiązane inaczej, ale w związku z ograniczeniami czasowymi i finansowymi, całość wygląda jak wygląda.
Efekt końcowy



Dokumentacja
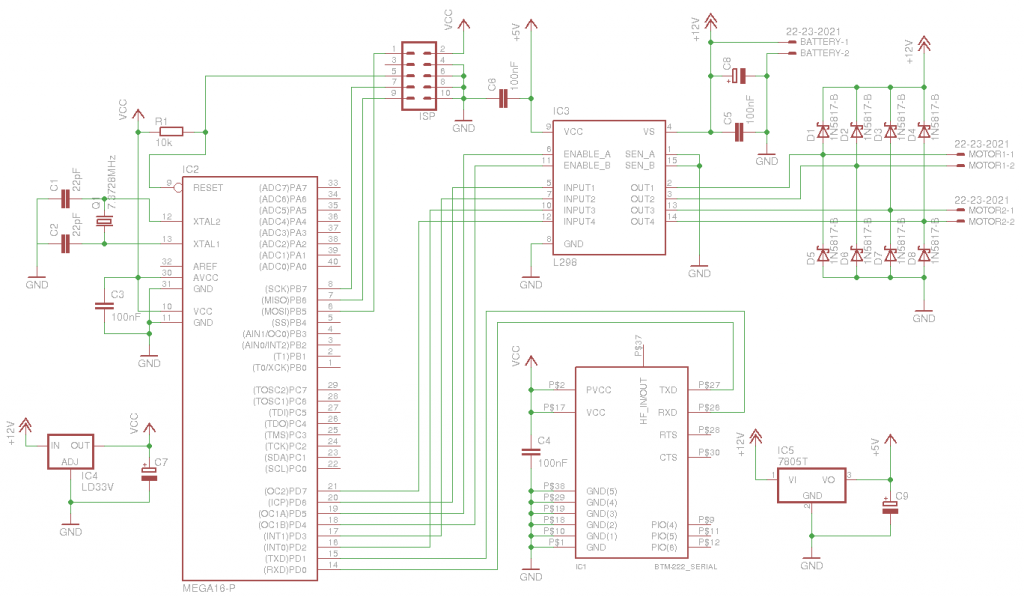
Schemat w PNG